媒体报道
了解迈致动态,聚焦行业走向
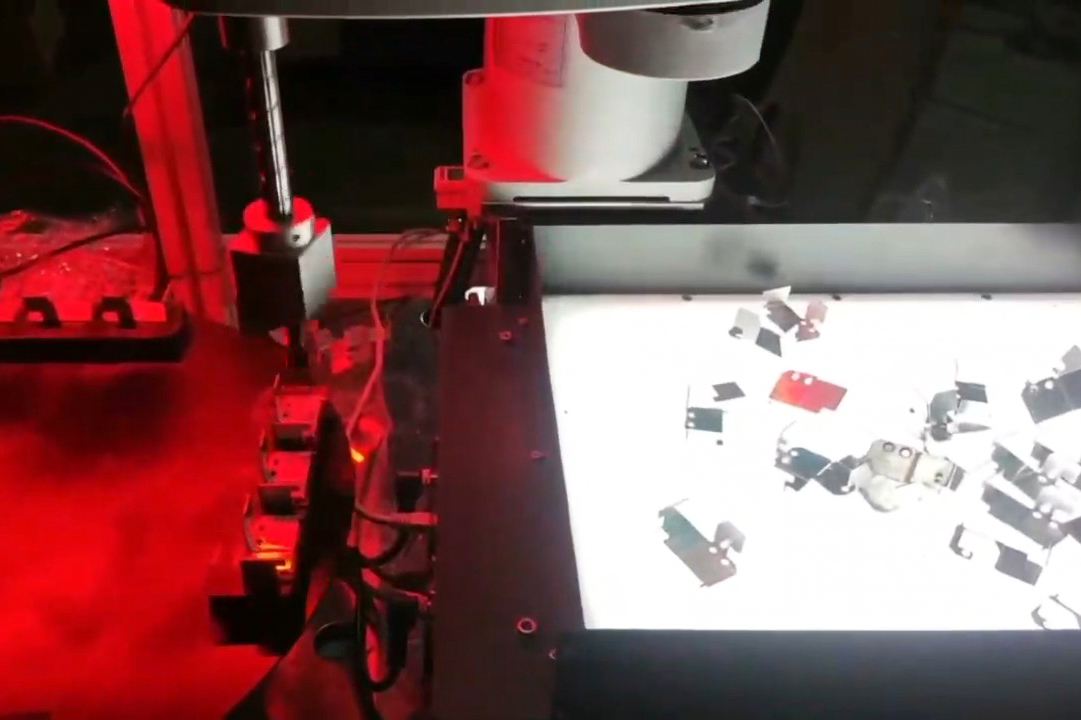
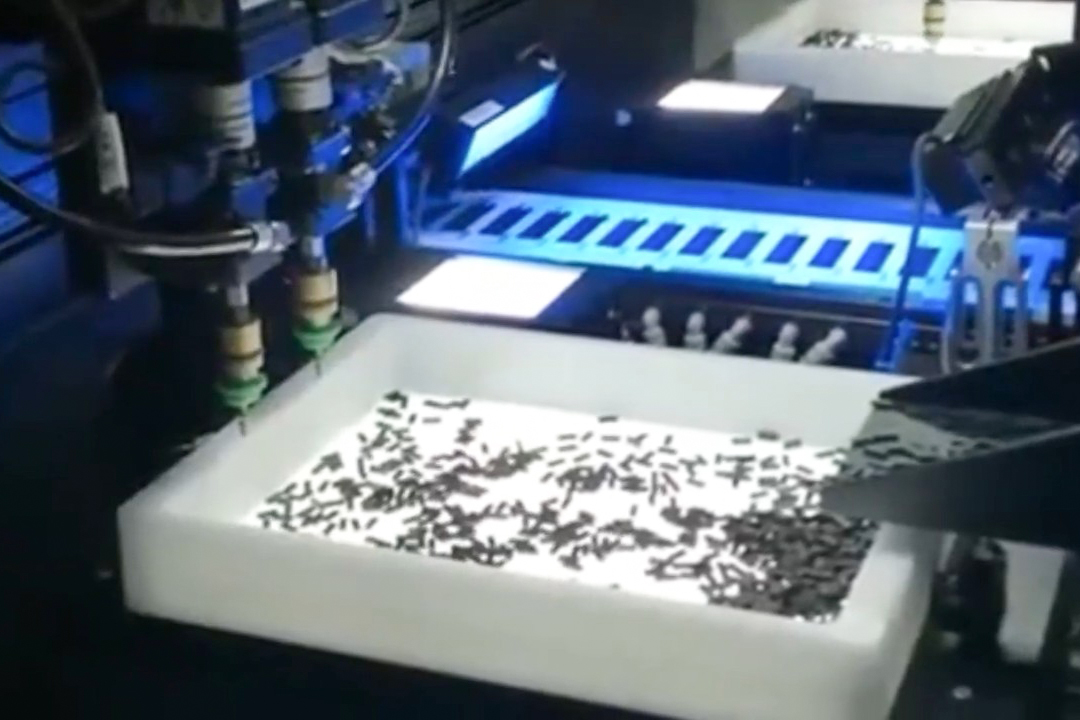
柔性视觉选料的核心是利用机器人3D视觉定位系统,基于三角测量法的原理,通过立体相机的快速扫描,获取工件的点数据,通过对点数据进行3D建模,并对建模特征进行智能分析,以判断出工件当前的姿态位置,通过数据接口发送工件光前的座标给机器人,让机器人拥有像人一样的视觉能力,使其在生产线中实现对目标的分拣和抓取,降低生产的错误率,减少工业生产环节的成本,解决无序工件的抓取难题。

在小型异形零件工件的自动化生产中,需要将小型异形零件一个个完成分料后送入CNC中进行加工,然后再将CNC中完成加工的小型异形零件送入送料轨道中。现有技术中,采用人工的方式完成小型异形零件的分料,上料和送料工作。采用人工的方式不仅工作劳动强度大,而且导致生产加工效率低下。

而柔性视觉选料能够克服上述不足,自动完成异形零件的自动排列上料工作,减轻工人的劳动负担,提高工作效率,满足现在的智能化要求和多个品种使用一个工装的定位问题。3D视觉识别系统能够解决柔性化工装的问题,替代了传统的工装夹具,为传统制造业(例如劳动密集型生产线、机械、铸造等领域)提供自动化、智能化、无人化的上料、拾取、分拣等应用解决方案。